В рамках гранта РНФ № 24-29-00671 под руководством главного научного сотрудника лаборатории №40 «Интеллектуальных систем управления и моделирования» д.т.н. О.С. Амосова исследовались методы совместной навигации для группы беспилотных аппаратов (БА), которые находились в разных средах. Также были разработаны новые интеллектуальные алгоритмы комплексирования данных от различных систем измерения — навигационных систем, маяков, интеллектуальных буев и спутниковых источников.
 Результаты были получены с помощью программно-аппаратного комплекса верификации математических моделей и алгоритмов ориентации БПЛА в реальных условиях, разработанного в ИПУ РАН. Разработчики — сотрудники лаборатории №1 «Динамических информационно-управляющих систем им. Б. Н. Петрова», лаборатории №7 «Адаптивных и робастных систем им. Я. З. Цыпкина», лаборатории №16 «Нелинейных систем управления им. Е.С. Пятницкого», лаборатории №17 «Эргатических систем», лаборатории №37 «Систем с разрывными управлениями», лаборатории №80 «Киберфизических систем» и лаборатории №90 «Цифровых систем управления в агропромышленном комплексе».
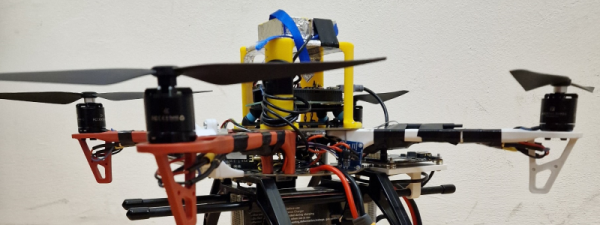
Результаты были получены с помощью программно-аппаратного комплекса верификации математических моделей и алгоритмов ориентации БПЛА в реальных условиях, разработанного в ИПУ РАН. Разработчики — сотрудники лаборатории №1 «Динамических информационно-управляющих систем им. Б. Н. Петрова», лаборатории №7 «Адаптивных и робастных систем им. Я. З. Цыпкина», лаборатории №16 «Нелинейных систем управления им. Е.С. Пятницкого», лаборатории №17 «Эргатических систем», лаборатории №37 «Систем с разрывными управлениями», лаборатории №80 «Киберфизических систем» и лаборатории №90 «Цифровых систем управления в агропромышленном комплексе».
Комплекс представляет собой универсальную программно-аппаратную платформу на базе отечественного микроконтроллера K1986BE92QI, предназначенную для научных исследований, апробации алгоритмов управления, фильтрации и навигации в условиях, приближенных к реальной эксплуатации БПЛА.
Ключевая задача комплекса — обеспечение гибкой среды для тестирования математических моделей различного уровня сложности: от классических ПИД-регуляторов до адаптивных алгоритмов.
Платформа служит полигоном для междисциплинарных исследований в области робототехники, теории управления и технического зрения.
Решения, полученные в ходе исследования, могут стать основой для новых проектов и способствовать развитию технологий беспилотной навигации в России.
Предлагаем вашему вниманию несколько публикаций, в которых были описаны полученные результаты.
1. Амосов О.С., Амосова С.Г. Интеллектуальные технологии совместной навигации и функционирования подвижных объектов в разных физических средах // Информационные технологии. 2025. Т. 31. № 1. С. 24-34. DOI: 10.17587/it.31.24-34
2. Амосов О.С., Амосова С.Г., Иочков И.О. Критический анализ современного состояния проблемы навигации беспилотных объектов по существующим средствам измерений // Информатика и системы управления. – 2024. – №4(82). – С. 158–182. – DOI: 10.22250/18142400_2024_82_4_158
3. Амосов О.С., Амосова С.Г., Кулагин К.А. Моделирование виртуального полигона для отработки совместной навигации группы разнородных беспилотных аппаратов // В сборнике докладов: XXXIV конференция памяти выдающегося конструктора гироскопических приборов Н.Н. Острякова. – СПб.: ГНЦ РФ АО «Концерн «ЦНИИ «Электроприбор», 01–03 Октября 2024 г. – С. 117 – 120.