 |
| Основатель и первый зав. лаб. № 3 Михаил Александрович Гаврилов |
Основателем лаборатории был знаменитый МАГ, будущий член-корреспондент АН СССР, д.т.н., профессор Михаил Александрович Гаврилов, который был приглашён в созданную в 1934 г. Комиссию по автоматике, телемеханике и диспетчеризации. Лаборатория по релейной телемеханике (будущая лаб. № 3) входила в состав Комиссии, преобразованной в 1939 г. в Институт автоматики и телемеханики (ИАТ). Лабораторию в составе ИАТа возглавил М.А. Гаврилов.
В 1938–1946 гг. М.А. Гаврилов разработал теорию релейно-контактных схем (РКС), в которой впервые в мире предложил строгий математический подход к решению основных задач проектирования РКС: формализации условий работы, анализа и синтеза структур (книга «Теория релейно-контактных схем», 1950). За развитие этой теории в 1958 г. Президиум АН СССР присудил М.А. Гаврилову премию им. П.М. Яблочкова, в 1963 г. он избирается членом-корреспондентом АН СССР.
Под руководством М.А. Гаврилова была создана всесоюзная научная школа, охватывающая все республики и крупные города СССР, в рамках которой получили развитие на мировом уровне методы анализа и синтеза конечных автоматов, модели коллективного поведения автоматов, методы надёжностного синтеза, теория схем с самоконтролем, теория однородных сред, методы проектирования распределённых систем логического управления, теория языков логического управления. С начала 60-х гг. было проведено более 30 школ по логическому управлению (впоследствии – школ им. М.А. Гаврилова).
Под научным руководством М.А. Гаврилова было защищено около 90 кандидатских и докторских диссертаций.
В разное время сотрудниками лаборатории были такие известные учёные, как И.В. Прангишвили, П.П. Пархоменко, А.А. Амбарцумян, О.П. Кузнецов.
 |
| Александр Артёмович Амбарцумян руководил лабораторией № 3 более 30 лет |
После смерти Михаила Александровича в 1979 г. заведующим лабораторией стал его ученик доктор технических наук, профессор Александр Артёмович Амбарцумян.
Основные научные и прикладные направления лаборатории (1980–1990)
Исследование и разработка моделей и методов логического управления:
– Теория структуризации конечных автоматов и логических алгоритмов с оценкой сложности структурирования (А.А. Амбарцумян).
– Методы синтеза отказобезопасных асинхронных логических устройств (А.И. Потехин) и, на их основе, разработка и изготовление на предприятиях МРП (г. Зеленоград) трёх БИС на базовых-модульных кристаллах (БМК).
– Комплекс отказобезопасных средств программируемой автоматики с параллельной структурой (СПА-ПС) для построения низового уровня АСУ ТП. Основные технические идеи, заложенные в основу СПА-ПС, заключались в распределённости, специализации, отказобезопасности, отказоустойчивости. С 1997 г. СПА-ПС используются в проектах систем управления, важных для безопасности (объектов атомной и тепловой энергетики, газо- и нефтедобывающей, а также перерабатывающей промышленности).
– Концепция перспективной АСУ ТП АЭС на основе программируемых логических контроллеров.
– Новые принципы и методы создания АСУ с повышенной защитой от ошибок человека.
Эти исследования и разработки ведущих сотрудников лаборатории того периода: А.А. Амбарцумяна, А.И. Потехина, Б.А. Лаговиера и др. – составили научную базу проектирования АСУ атомных электростанций нового поколения с высокой степенью автоматизации, надёжности и качества управления технологическими процессами.
Результаты работ по АСУ ТП АЭС обобщены в двух монографиях:
1. И.В. Прангишвили, А.А. Амбарцумян. Научные основы построения АСУ сложными энергетическими системами. – М.: Наука, 1992.
2. И.В. Прангишвили, А.А. Амбарцумян. Основы построения АСУ сложными технологическими процессами. – М.: Энергоатомиздат, 1994.
Основные научные и прикладные направления лаборатории (1990–2000)
В лаборатории были разработаны и внедрены следующие АСУ ТП:
– система управления элеватором в г. Бутурлиновка Воронежской области;
– информационная система слежения за качеством теплоносителя в ТЦП (температура, давление, расход и т.д.); пилотный проект этой системы был реализован на двух ЦТП в СВАО г. Москвы,
– технические проекты АСУ ТП-90, АСУ ТП-НП (нового поколения), АСУ ТП Бушер (совместно с АЭП Минатома);
– концепция построения систем управления технологическими процессами в нефтедобывающих предприятиях (ООО «Лукойл», ООО «ТНК»).
 |
| Дожимная насосная станция компании «ТНК» |
Основные научные и прикладные направления лаборатории (2000–2008)
Разработка теоретических основ дискретно-событийного моделирования объектов автоматизации и разработка на его основе методов проектирования систем управления технологическими процессами:
– Новая концепция и методы управления информационными и материальными потоками на основе дискретно-событийных моделей объектов автоматизации, позволяющие перейти от управления с использованием традиционных жёстких алгоритмов (основная нынешняя практика) к управлению по моделям технологических процессов (ТП).
– Дискретно-событийные модели объектов управления и ТП (на примере нефтедобывающей отрасли), которые включают:
– модели компонентов – агрегаты (задвижки, насосы, ёмкости и т.д.);
– модели процессов – технологически востребованных конфигураций (фрагментов технологической сети, установок, переделов и т.п.);
– модели регламентов – активные технологические сценарии;
– модели диалога с персоналом, позволяющие повысить эффективность управления и безопасность ведения процессов за счёт ограничения деятельности человека в контуре управления.
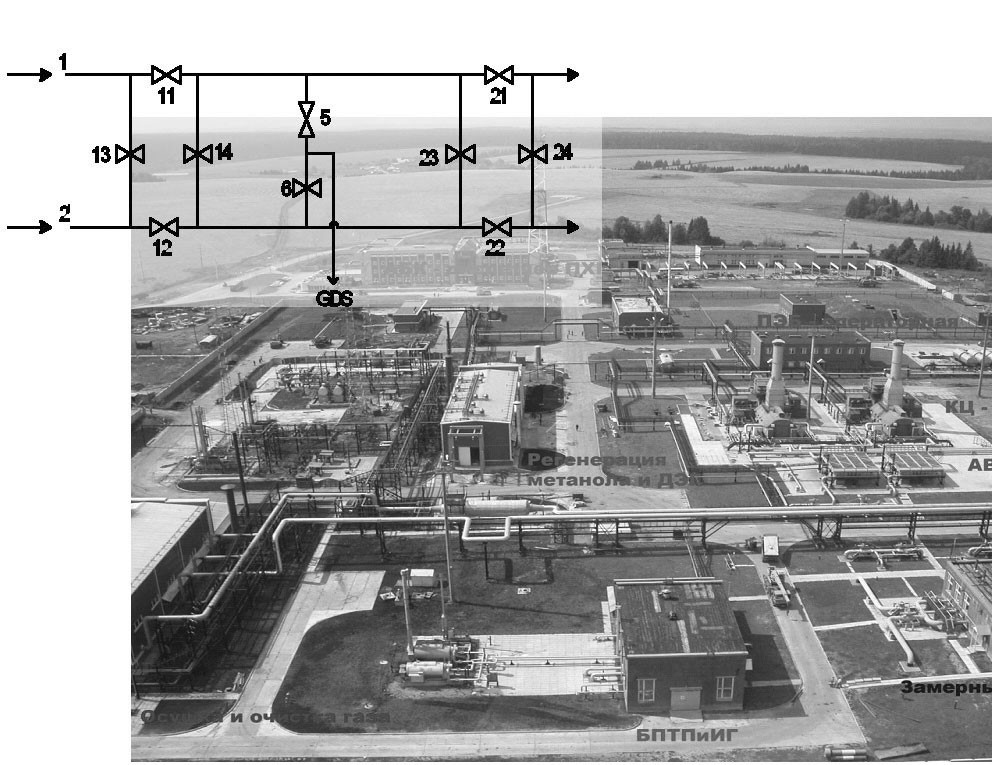 |
| Линейный пункт перекачки газа ООО «Лентрансгаз» и его структурная схема |
Основные научные результаты по дискретно-событийному моделированию опубликованы в ведущих зарубежных и российских журналах («АиТ», «Проблемы управления») и в двух монографиях:
1. А.А. Амбарцумян, А.И. Потехин. Управление технологическими процессами поточного типа на основе событийного моделирования. – М.: Гринвич, 2005.
2. А.А. Амбарцумян, С.А. Браништов. Событийные модели управления технологическими процессами, ориентированные на защиту от ошибочных действий персонала. – М.: Гринвич, 2006.
По направлению событийное моделирование технологических процессов в лаборатории подготовлены и защищены 2 кандидатские диссертации: Д.Л. Казанским (2004), С.А. Браништовым (2008).
C 2012 г. по настоящее время лабораторией руководит к.т.н. Сергей Александрович Браништов.
Дискретно-событийное моделирование транспортных систем
 |
| Зав. лаб. № 3 Сергей Александрович Браништов |
Опираясь на богатый опыт лаборатории, продолжаются работы по развитию фундаментальных методов повышения уровня автоматизации в промышленности.
Результаты этих работ нашли применение в интеллектуальной системе поддержки диспетчера железнодорожного транспорта. Здесь разрабатываются методы дискретно-событийного моделирования железнодорожных объектов, методы синтеза супервизоров и методы группового управления в транспортной системе, направленные на цели повышения безопасности и пропускной способности. Исследованы задачи автоматизации приготовления и выбора маршрута движения поездов на станции с разветвлённой схемой путей. Разработан метод анализа топологий железнодорожных сетей и подход к алгоритмизации процесса управления поездной и маневровой работы. Разработана обобщённая модель функционирования и управления группой автономных компонент дискретно-событийной (ДС) системы железнодорожного участка. В составе модели разработаны ДС-модели базовых объектов управления на железнодорожно-транспортной сети (станций, перегонов, стрелок, локомотивов, вагонов, сортировочных станций, сортировочных горок). Модели компонент представлены в иерархических автоматных и цветных сетях Петри. Определена структура и правила взаимодействия моделей и процедура управления движением транспортных средств.
В ходе работы был проведен анализ технологии управления поездной работой на железнодорожной станции и анализ систем автоматизации диспетчерского управления; разработана база данных элементов путевого развития станции и алгоритмы синтеза суточного плана-графика и его исполнения для формирования маршрутов движения. Эксперименты показали способность алгоритма в приемлемое время находить решение и строить график движения при различных условиях. Разработанный алгоритм используется для перерасчёта графика движения при возникновении нештатной или аварийной ситуации и применяется для оперативного управления движением.
На основе этих подходов был создан прототип программного обеспечения для АРМ дежурного по станции, который включает следующие функции:
– Интерфейс разработки схемы путевого развития станции. Он позволяет создавать схему станции из библиотеки интерактивных элементов: участки пути, стояночные пути (приема-отправления, парковые, тупики), маневровые и маршрутные светофоры, стрелки и др.
– Расчёт суточного плана-графика работы станции (исполняемого расписания) на основании схемы станции и расписания движения поездов. По информации о временах движения поездов и пункте следования автоматически строятся маршруты движения так, чтобы выполнялись требования безопасности (нескрещивание маршрутов, интервалы следования, скорость) и точность исполнения расписания.
– Динамическое перестроение суточного плана-графика работы станции: выполняется по указанию дежурного в любой момент времени в случае нарушения расписания или для разрешения сложной или аварийной ситуации. При этом алгоритм расчёта расписания позволяет выполнять анализ эффективности расписания и использования инфраструктуры станции.
ПО АРМ дежурного обладает свойством универсальности и может быть использовано для различных станций.
Модели поведения мобильных роботов среди людей
В связи с перспективами развития робототехники сформулированы новые научные задачи.
Это направление работ посвящено проблемам организации движения большого числа автономных мобильных роботов в неопределённой среде. Под неопределённостью среды понимается, что система управления обладает недостаточной информацией о свойствах среды функционирования для расчёта управляющего воздействия до достижения цели, но может располагать знаниями о среде, ограниченными некоторой локальной окрестностью. Такая среда характерна для неисследованного или изменчивого пространства. Исследуемая проблема актуальна, например, для автономных наземных роботов, движущихся группой в помещениях и среди людей, или в городской среде при большом числе летающих роботов.
В последнее время большим группам роботов уделяют большое внимания. Роем называют такие системы, которые используют большое число роботов (агентов), пользующихся при достижении общей цели общими правилами поведения. Как правило, рой роботов должен работать в распределённом режиме управления и использовать малые ресурсы связи. В настоящее время для таких групп ведётся активная проработка новых алгоритмов управления и координации. Одна из самых сложных проблем, связанных с управлением роем, обуславливается движением большого количества роботов к одной и той же цели в одно и то же время, в результате чего возникают конфликты, для разрешения которых требуется время. Такая проблема может возникнуть, когда цели движения роботов совпадают или когда группы движутся по пересекающимся, совпадающим маршрутам.
Большинство результатов, посвящённых управлению движением и избеганию столкновений, получено для структурированных сред (на известной карте пространства), когда навигация роботов происходит по выделенным путям и их пересечениям. В тех пересечениях, в которых возникает конфликт, он разрешается посредством расстановки приоритетов или согласования действий. Такие алгоритмы избегания столкновений разрабатываются и тестируются только для маленьких групп роботов. Для большого числа роботов эти алгоритмы неудобны, так как при распределённом управлении сложно осуществлять взаимные коммуникации всех роботов одновременно. При этом проблема локальных столкновений может быть решена, однако проблема глобального затора остаётся неразрешённой.
Развивая это направление, лаборатория разрабатывает и исследует правила поведения мобильных роботов среди людей при движении в помещениях и в толпе. Создаются методы представления и обработки знаний робота об окружающем пространстве, поиска и оценки траекторий движения, оценки конфликтных мест пространства. Ведутся работы по созданию базовых правил поведения роботов в скоплении.
На повестке дня ещё одна большая и значимая задача – исследование проблем координации и согласования поведения отдельных автономных роботов. Изучается объём области информационного обмена для каждого робота, и в зависимости от размера этой области оценивается эффективность управления информационным трафиком. Разрабатываются требования к содержанию информационного обмена. Производится оценка нагрузки на сеть передачи данных.
В сфере научных интересов лаборатории: методы построения маршрутов по известной карте препятствий, алгоритмы избегания столкновений, методы управления следованием заданного пути, распознавание динамических препятствий с помощью машинного зрения и др.
С 2007 г. в составе лаборатории работает молодёжная научная школа (МНШ), поддержанная грантом Института. В составе лаборатории – 3 кандидата технических наук и 2 аспиранта. Со дня образования лаборатории её сотрудниками опубликовано более 500 научных работ. Лаборатория постоянно участвует в работе российских и международных конференций (в том числе симпозиумов и конгрессов ИФАК). В 2003 г. лаборатория организовала и провела международную конференцию, посвящённую 100-летию со дня рождения М.А. Гаврилова.
В 2008–2012 гг. лаборатория (при финансовой поддержке РФФИ и активном участии других лабораторий Института) организовала и провела три Всероссийские конференции с международным участием «Технические и программные средства систем управления, контроля и измерения» (УКИ-8, УКИ-10, УКИ-12).