
 Работы проводились старшим научным сотрудником лаборатории №80 «Киберфизических систем» к.т.н. С.Г. Амосовой и научным сотрудником отдела №73 «Управляющих задач в цифровой картографии» К.А. Кулагиным под руководством главного научного сотрудника лаборатории №40 «Интеллектуальных систем управления и моделирования» д.т.н. профессора О.С. Амосова в рамках реализации гранта РНФ № 24-29-00671 по теме «Разработка метода и алгоритмов совместной навигации беспилотных аппаратов».
Работы проводились старшим научным сотрудником лаборатории №80 «Киберфизических систем» к.т.н. С.Г. Амосовой и научным сотрудником отдела №73 «Управляющих задач в цифровой картографии» К.А. Кулагиным под руководством главного научного сотрудника лаборатории №40 «Интеллектуальных систем управления и моделирования» д.т.н. профессора О.С. Амосова в рамках реализации гранта РНФ № 24-29-00671 по теме «Разработка метода и алгоритмов совместной навигации беспилотных аппаратов».
Робототехнические платформы были укомплектованы электронными компонентами отечественного производства. Эксперименты проводились в сотрудничестве с компанией «Прикладная Робототехника Авиа».
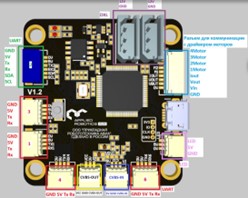
 В частности, на беспилотных аппаратах были установлены отечественные полетные контроллеры, регуляторы скорости моторов (ESC), а также различные сенсоры. Это позволило протестировать работу аппаратов полностью на базе электронных компонент российского производства.
В частности, на беспилотных аппаратах были установлены отечественные полетные контроллеры, регуляторы скорости моторов (ESC), а также различные сенсоры. Это позволило протестировать работу аппаратов полностью на базе электронных компонент российского производства.
Помимо натурных испытаний, участники коллектива провели ряд экспериментов с цифровыми двойниками ровера и гексакоптера в виртуальном полигоне, разработанном в ИПУ РАН. Симуляция навигации и взаимодействия группы беспилотных аппаратов, работающих в разных средах, моделировалась с использованием фреймворка AirSim в Unreal Engine. Программная платформа была адаптирована для интеграции с отечественным полетным контроллером.
 В ходе экспериментов ровер двигался по заданному маршруту, в то время как гексакоптер летел над ним, повторяя траекторию движения наземного робота. В процессе испытаний были собраны данные с различных сенсоров, установленных на обоих аппаратах, для дальнейшего анализа и сопоставления. На основе полученных данных предложен проект системы и алгоритмы комплексирования для навигации подвижных объектов с использованием интеллектуальных технологий.
В ходе экспериментов ровер двигался по заданному маршруту, в то время как гексакоптер летел над ним, повторяя траекторию движения наземного робота. В процессе испытаний были собраны данные с различных сенсоров, установленных на обоих аппаратах, для дальнейшего анализа и сопоставления. На основе полученных данных предложен проект системы и алгоритмы комплексирования для навигации подвижных объектов с использованием интеллектуальных технологий.
Проведенные эксперименты, как с реальными роботами, так и с их цифровыми двойниками, продемонстрировали возможность согласованного взаимодействия наземного и воздушного роботов при выполнении совместных задач. Применение виртуального полигона позволило безопасно отработать алгоритмы групповой робототехники перед натурными испытаниями.
Все эксперименты прошли успешно. Результаты показали перспективы использования электронной компонентной базы отечественного производства в составе современных робототехнических комплексов, а также потенциал кросс-платформенного моделирования для ускорения разработки и тестирования алгоритмов управления мультиагентными системами.