Консультант(ы):
Ключевые слова:
Тематика проводимого исследования:
Наука о данных, машинное обучение, идентификация систем
Приобретаемые знания:
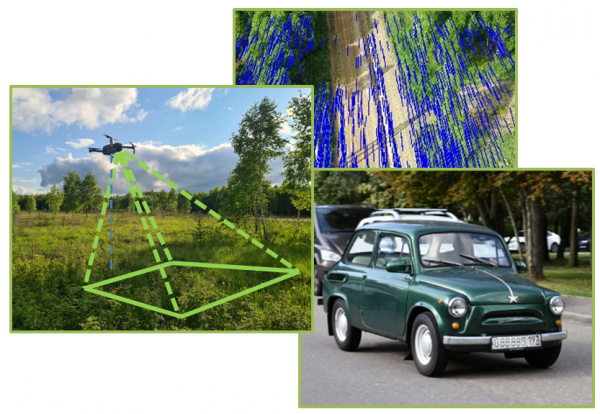
Знания в области обработки видеоизображений с бортовых камер колесных роботов и дронов (могут быть полезны при разработке систем технического зрения сельскохозяйственных роботов для задач точного земледелия, а также беспилотных транспортных средств).
Приобретаемые навыки и умения:
Умение программно реализовывать расчет оптического потока видеоизображения; умение аггрегировать визуальную информацию в целях локализации собственного положения мобильного робота.
Необходимый уровень знаний и навыков практиканта для выполнения задания:
Линейная алгебра, математический анализ, физика, владение языком программирования Python
Тип проекта:
Практика / научно-исследовательская работа
Период практики:
1 семестр
Краткое описание проекта:
Рассматривается задача оценки линейной и вращательной скоростей мобильного робота; требуется найти особые точки на видеокадрах, рассчитать оптический поток и перевести оптический поток в параметры движения мобильного робота.
Задания на практику:
1) разработать программно-алгоритмическое обеспечение для загрузки и отображения видеозаписей с бортовой камеры мобильного робота;
2) разработать обобщенный алгоритм визуальной одомерии мобильного робота с учетом характера внешней среды;
3) реализовать обнаружение ключевых точек изображения и расчет оптического потока по ключевым точкам на соседних видеокадрах;
4) реализовать пересчет оптического потока в параметры движения мобильного робота;
5) реализовать пересчет скоростей мобильного робота в его текущие пространственные координаты;
6) оценить погрешность реализованного алгоритма навигации.
Результат выполнения проекта:
Отчет о полученных результатах визуальной одометрии; методика настройки алгоритма визуальной одометрии в зависимости от характера внешней среды; программная реализация алгоритма визуальной одометрии на языке программирования Python.