Консультант(ы):
Ключевые слова:
Тематика проводимого исследования:
Управление дронами, подводными, космическими и наземными роботами
Приобретаемые знания:
Знания в области имитационного моделирования шагающих роботов (могут быть полезны при разработке систем управления движением сервисных, сельскохозяйственных и поисково-разведываетельных роботов, обладающих повышенным уровнем проходимости в сложных условиях местности).
Приобретаемые навыки и умения:
Умение программно реализовывать модель управляемого движения шагающего робота на языке Python; умение выбирать коэффициенты ПИД-регулятора и настраивать циклы походки на исполнительном и тактическом уровнях управления, соответственно.
Необходимый уровень знаний и навыков практиканта для выполнения задания:
Линейная алгебра, дифференциальные уравнения, теория управления, владение языком программирования Python
Тип проекта:
Практика / научно-исследовательская работа
Период практики:
1 семестр
Краткое описание проекта:
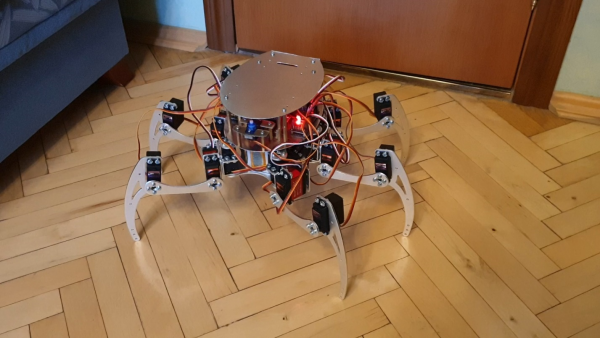
Рассматривается задача настройки исполнительного и тактического уровней системы управления движением автономного шагающего робота; требуется разработать виртуальную модель шагающего робота и реализовать его тестовое перемещение.
Задания на практику:
1) ознакомиться с аппаратным обеспечением шагающего робота и составить его кинематическую схему;
2) разработать виртуальную модель автономного шагающего робота (в средах Gazebo или CoppeliaSim EDU);
3) разработать алгоритм позиционного управления педипулятором шагающего робота;
4) разработать алгоритм походки шагающего робота по ровной поверхности;
5) программно реализовать алгоритм прямолинейного движения шагающего робота на виртуальной модели;
6) программно реализовать алгоритм поворота шагающего робота на виртуальной модели.
Результат выполнения проекта:
Отчет о полученных результатах моделирования шагающего робота; программная реализация движения шагающего робота на языке программирования Python.