Консультант(ы):
Ключевые слова:
Тематика проводимого исследования:
Управление движением и навигация
Приобретаемые знания:
Методы расчета движения твердых тел в пространстве, методы численного интегрирования, методы численной параметрической оптимизации (эти знания могут быть полезны при создании систем управления движущимися объектами)
Приобретаемые навыки и умения:
Математическое моделирование, программирование, построение стендов для исследования систем управления, написание отчетов на основе проведенных исследований
Необходимый уровень знаний и навыков практиканта для выполнения задания:
теория управления, дифференциальные уравнения, физика
Тип проекта:
Практика / научно-исследовательская работа
Период практики:
3 недели
Краткое описание проекта:
Рассматривается самоходный необитаемый подводный аппарат с нулевой плавучестью и комплектом горизонтальных и вертикальных рулей. Требуется построить систему управления аппаратом по курсу и глубине, оптимизировать параметры регулятора этой системы по заданному показателю качества переходного процесса и провести численное моделирование системы с различными значениями заданий курса и глубины.
Задания на практику:
1. Составить программу моделирования динамики подводного аппарата по заданной в виде системы дифференциальных уравнений математической модели.
2. Составить математические модели регуляторов заданной структуры для управления аппаратом по курсу и по глубине, а также программы для их численного моделирования.
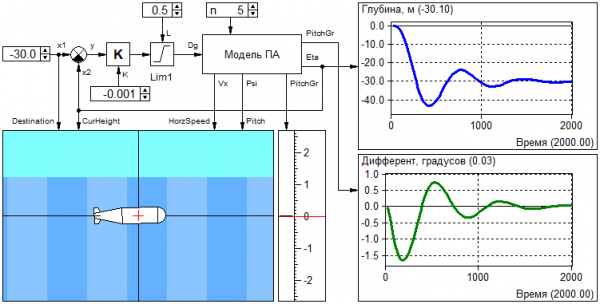
2. Построить программный стенд (программу моделирования), позволяющий исследовать поведение аппарата при различных отклонениях рулей (с отключенными регуляторами) и при различных заданиях глубины и курса (с подключенными регуляторами). Результаты моделирования должны отображаться в виде числовых значений и графиков изменения координат.
3. Провести численное моделирование движения аппарата при различных значениях отклонений горизонтальных и вертикальных рулей.
4. Провести поиск оптимальных по заданному критерию коэффициентов регуляторов.
5. Построить графики перехода аппарата на заданную глубину, на заданный курс и на заданные глубину и курс одновременно при исходных и при оптимальных параметрах регуляторов.
Результат выполнения проекта:
Отчет, содержащий описание модели объекта, программную реализацию этой модели, структурную схему моделирующего стенда, принципиальную схему системы управления, результаты моделирования.