Уважаемые коллеги!
1 июля 2024 года состоится очередное заседание постоянно действующего научного семинара «Проблемы управления автономными робототехническими комплексами» (ИПУ РАН, Москва).
Время проведения: 11.00 — 13.15 (по московскому времени)
Место проведения: ауд. 625/627. Формат проведения: очно
Тема доклада:
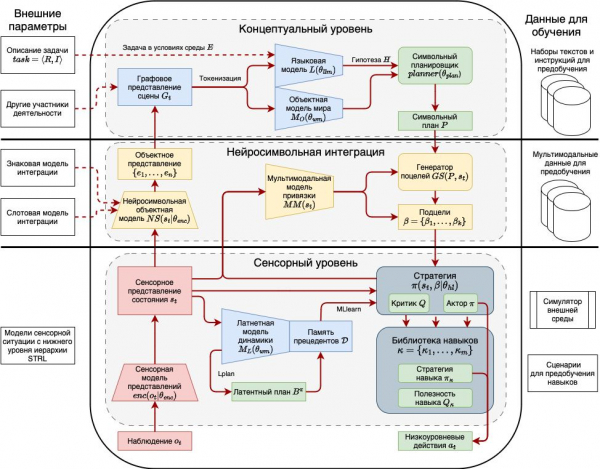
«Методы и алгоритмы нейросимвольного обучения и планирования поведения когнитивных агентов».
Докладчик: к.ф-м.н. Панов Александр Игоревич, в.н.с. ФИЦ ИУ РАН.
Аннотация
В докладе будут предложены к обсуждению основные положения диссертационных исследований. В диссертационной работе соискателем предложены и теоретически обоснованы новые математические модели, методы и алгоритмы генерации поведения когнитивного агента в динамической среде. Автором впервые предложен единый подход к проблеме привязки символов за счёт разработки методов нейросимвольной интеграции в обучении и планировании.
Основные научные и практические результаты:
- разработана нейросимвольная архитектура управления поведением когнитивного агента, включающая в себя компоненты одновременного планирования и обучения, а также компонент концептуального планирования с использованием языковых моделей;
- разработаны модели и методы интеграции планирования и обучения с подкреплением, — в том числе с использованием модели среды, — для решения сложных визуальных и векторных задач управления поведением когнитивным агентом, — в том числе в многоагентной постановке;
- созданы модели и методы объектно-центричного подхода к представлению сенсорной информации о статических сценах для использования в нейросимвольной архитектуре управления поведением когнитивного агента;
- разработаны модели и методы объектно-центричного обучения с подкреплением с использованием динамической модели среды для интеграции планирования и обучения в нейросимвольной архитектуре управления поведением когнитивного агента;
- усовершенствован ряд существующих моделей и методов обучения с подкреплением на основе модели «мира», с моделями внутренней мотивации и с использованием эвристических планировщиков;
- разработана программная реализация системы управления робототехническими платформами с использованием языковых моделей для подзадачи планирования.
Ключевые слова и словосочетания: обучение с подкреплением, планирование поведения, объектно-центричные представления, нейросимвольная интеграция, навигация, большие языковые модели, мобильная робототехника.
Текст диссертации — https://disk.yandex.ru/i/TS_BGtHA86ql7g ,
проект автореферата — https://disk.yandex.ru/i/hS17fGdgyUUE0w .
Присылайте председателю семинара свои предложения с готовностью выступления на семинаре!
Председатель семинара:
доктор технических наук, профессор Мещеряков Роман Валерьевич,
адрес электронной почты: mrv@ipu.ru
Ученый секретарь:
кандидат технических наук Рожнов Алексей Владимирович,
адрес электронной почты: rozhnov@ipu.ru
Ссылка на основную страницу Общемосковского семинара «Проблемы управления автономными робототехническими комплексами» (ИПУ РАН, Москва):
http://www.ipu.ru/robot
Дата:
Место:
- 625/627 УЛК