Консультант(ы):
Ключевые слова:
Тематика проводимого исследования:
Теория автоматического управления
Приобретаемые знания:
Современные методы подавления и компенсации параметрических и внешних возмущений, декомпозиционный синтез наблюдателей состояний и возмущений
Приобретаемые навыки и умения:
Проектирование сложной системы автоматического управление, численное моделирование замкнутой системы в среде MATLAB-Simulink, расчет и анализ показателей качества регулирования
Необходимый уровень знаний и навыков практиканта для выполнения задания:
Основы линейной алгебры, математического анализа и теории обыкновенных дифференциальных уравнений, теории автоматического управления, MATLAB-Simulink
Тип проекта:
Практика / научно-исследовательская работа
Период практики:
3-4 недели непрерывно или рассредоточено
Краткое описание проекта:
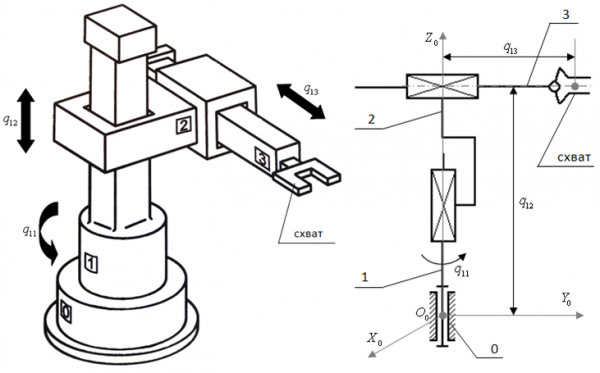
В качестве объекта управления рассматривается полноприводный робот-манипулятор, функционирующий в цилиндрическом рабочем пространстве с тремя степенями свободы. Манипулятор функционирует в условиях действия параметрических и внешних возмущений, при неполном комплекте датчиков. Требуется сформировать закон управления в форме динамической обратной связи, обеспечивающий отслеживание обобщенными координатами заданных траекторий инвариантно по отношению к внешним возмущениям.
Задания на практику:
1) изучить современные методы подавления и компенсации параметрических и внешних возмущений, декомпозиционного синтеза наблюдателей состояний и возмущений;
2) применить эти теоретические положения к задаче управления роботом-манипулятором с тремя степенями свободы в условиях неопределенности;
3) описать математическую модель объекта управления;
4) формализовать постановку задачи управления,
5) синтезировать базовый закон управления (в предположении, что все переменные состояния измеряются) с различными типами локальных обратных связей;
6) синтезировать редуцированный наблюдатель состояния для оценивания обобщенных скоростей по измерению обобщенных координат;
7) провести моделирование замкнутой системы со статической и динамической обратной связью в MATLAB-Simulink;
8) построить графики переменных состояния и рассчитать показатели качества регулирования;
9) провести сравнительный анализ результатов моделирования и сформулировать выводы.
Результат выполнения проекта:
Синтез инвариантной системы слежения; имитационное моделирование; отчет о полученных результатах.