Консультант(ы):
Ключевые слова:
Тематика проводимого исследования:
Управление движением и навигация
Приобретаемые знания:
Методы синтеза в задачах управления многомерными динамическими объектами (эти знания полезны при решении задач синтеза систем автоматического управления подвижными объектами)
Приобретаемые навыки и умения:
Умение формулировать постановки задач синтеза бортовых систем управления подвижными объектами
Необходимый уровень знаний и навыков практиканта для выполнения задания:
Теоретическая механика, дифференциальные уравнения, теория управления
Тип проекта:
Дипломная работа
Период практики:
6 месяцев
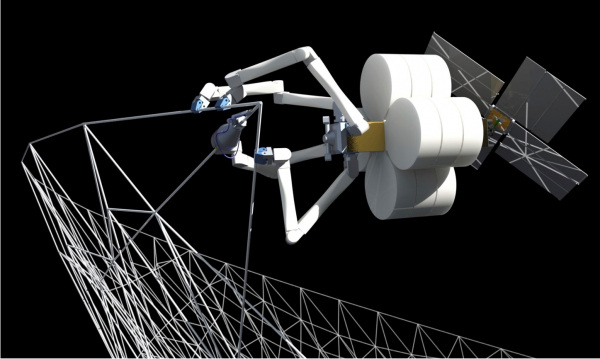
Краткое описание проекта:
Объект управления – большая космическая конструкция, которая представляет собой механическую структуру, содержащую упругие компоненты. При сборке конструкции зонтичного типа в открытом космосе с использованием свободно летающего космического манипуляционного робота отсутствует информация о механических характеристиках новых упругих элементов. Возникает проблема уточнения исходной математической модели, на основе которой формируются алгоритмы управления. Необходимо получить математическую модель большой космической конструкции с гиросиловыми исполнительными органами управления, которая позволяет оценить координаты углового движения конструкции, координаты упругих колебаний и их параметров, а также активно компенсировать влияние упругих колебаний на угловую ориентацию конструкции. На основе теории фильтра Калмана синтезировать алгоритм совместного оценивания координат углового движения конструкции и гиросиловых органов, тонов упругих колебаний конструкции и их параметров. Полученные оценки используются в адаптивных алгоритмах управления угловой ориентацией и стабилизацией большой космической конструкции с гиросиловыми исполнительными органами управления, что обеспечивает активную и быструю компенсацию влияния упругих элементов на динамику конструкции.
Задания на практику:
1) Формулировка задачи синтеза.
2) Разработка метода синтеза, реализующего в системе свойство гашения упругих колебаний для заданного класса подвижных объектов управления.
Результат выполнения проекта:
Дипломная работа.