Консультант(ы):
Ключевые слова:
Тематика проводимого исследования:
Теория автоматического управления
Приобретаемые знания:
Основы классической теории управления, методы анализа управляемости линейных и нелинейных систем, построение базовых типов управления для систем с возмущениями и без возмущений.
Приобретаемые навыки и умения:
Построение математической модели, линеаризация, численное моделирование, решение задач оптимизации.
Необходимый уровень знаний и навыков практиканта для выполнения задания:
Линейная алгебра, дифференциальные уравнения, ТФКП, функциональный анализ, теоретическая механика.
Тип проекта:
Практика / научно-исследовательская работа
Период практики:
3 недели
Краткое описание проекта:
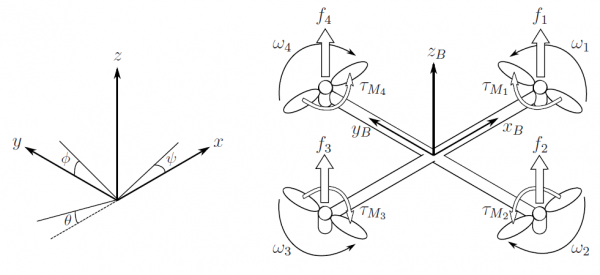
Рассмотреть модель квадрокоптера с четырьмя независимыми несущими винтами; описать динамику системы с учетом управления;, построить закон управления, позволяющий перевести состояние системы из начального в требуемое конечное с выбранным критерием качества.
Задания на практику:
1) составить математическую модель движения квадрокоптера;
2) в окрестности нуля линеаризовать полученную модель;
3) найти матрицу управляемости полученной системы;
4) для ненулевого начального положения построить стабилизирующее в нуле управление с применением формулы Аккермана;
5) численно провести моделирование, построить графики пространственных переменных и управления;
6) использовать средства MatLab для вычисления и представления результатов.
Результат выполнения проекта:
Отчет о результатах моделирования и полученном управлении, программа для численного решения задачи и представление графических результатов