Консультант(ы):
Ключевые слова:
Тематика проводимого исследования:
Теория автоматического управления
Приобретаемые знания:
Основы классической теории управления, методы анализа управляемости линейных и нелинейных систем, построение базовых типов управления для систем с возмущениями и без возмущений.
Приобретаемые навыки и умения:
Построение математической модели, линеаризация модели, численное моделирование, решение задач оптимизации.
Необходимый уровень знаний и навыков практиканта для выполнения задания:
Линейная алгебра, дифференциальные уравнения, ТФКП, функциональный анализ, теоретическая механика
Тип проекта:
Практика / научно-исследовательская работа
Период практики:
3 недели
Краткое описание проекта:
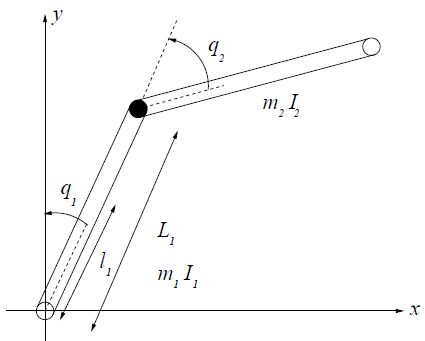
Рассмотреть модель робота-манипулятора на примере перевернутого двухзвенного маятника с приводом в локтевом шарнире, описать динамику системы с учетом управления, построить закон управления, позволяющий перевести состояние системы из начального в требуемое конечное с выбранным критерием качества.
Задания на практику:
1) составить математическую модель движения;
2) исследовать на устойчивость вертикальное положение равновесия;
3) исследовать существование системы канонического вида;
4) построить стабилизирующее управление методом линеаризации по состоянию;
5) найти матрицу управляемости полученной системы;
6) построить LQR регулятор;
7) численно провести моделирование;
8) использовать средства MatLab для вычисления и представления результатов;
9) в MatLab записать анимацию процесса стабилизации (опционально);
10) исследовать влияние возмущений и возможность их компенсации (опционально).
Результат выполнения проекта:
Отчет о результатах моделирования и полученном управление, программа для численного решения задачи и представления графических результатов.