26 октября 2023 года на заседании Ученого совета Института состоялся научный доклад, на котором были представлены итоги конкурса по синтезу регуляторов для системы управления необитаемым подводным аппаратом «Водяной». С основным докладом выступил один из разработчиков аппарата научный сотрудник лаборатории № 17 «Автоматизированных систем массового обслуживания и обработки сигналов» Н.А. Абраменков.
С 2014 г. в лаборатории № 17 Института ведутся работы по управлению роботами. В 2018 г. сотрудники лаборатории приняли участие в создании подводного аппарата «Малахит», который победил в своем классе аппаратов на конкурсе Аквароботех–2018. В процессе создания действующей модели были решены следующие задачи: стабилизация движения, использование видеоаналитики для помощи оператору в поиске определенных объектов и работе с ними, управление манипулятором. В дальнейшем большим коллективом сотрудников Института (М.П. Фархадов, А.В. Абдулов, А.Н. Абраменков, А.О. Санько) был разработан уникальный необитаемый подводный аппарат «Водяной» для проведения научных исследований в области компьютерного зрения, машинного обучения и управления мобильными роботами «под водой», а также групповой подводной робототехники. С помощью данного аппарата можно производить осмотровые работы (с видеофиксацией), сбор информации о рельефе дна, наличии предметов и препятствий, осмотр судов на наличие объектов, прикреплённых снаружи к борту, манипулирование посредствам схвата, патрулирование периметра по заданной траектории и множество других задач.
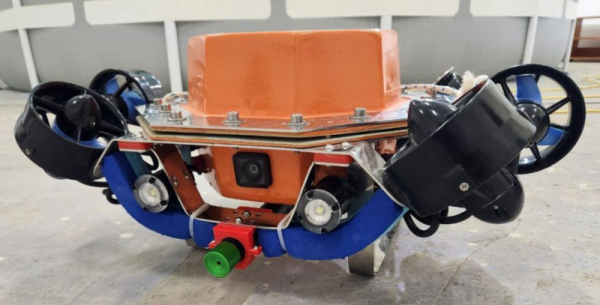
Сотрудники лаборатории № 17 г.н.с., заведующий лабораторией М.П. Фархадов (главный конструктор «Водяного»), н.с. А.В. Абдулов и н.с. А.Н. Абраменков представляли Институт на конкурсе «Восточный бриз 2020», посвященном морской робототехнике с аппаратом «Водяной-1» в классе телеуправляемых необитаемых подводных аппаратов тип А – сверхлегких аппаратов до 30 кг. «Водяной-1» представляет собой шестивинтовой подводный аппарат, расположение движителей которго позволяет выполнять всенаправленное движение с удержанием заданных углов крена и дифферента. Соревнования
состояли из четырех заданий: осмотр подводных кабельных линий (трубопровода), осмотр боносетевых заграждений, поиск затонувших объектов и выполнение подводно-технических работ на затопленном объекте. Команда лаборатории № 17 заняла первое место в тех соревнованиях.
В 2023 году в Институте прошёл конкурс по синтезу регуляторов для системы управления необитаемым подводным аппаратом «Водяной» среди команд различных лабораторий Института. Целью конкурса было разработать и на реальном объекте протестировать различные алгоритмы управления подводным аппаратом, направленные на решение конкретных задач подводного робота. Организаторами конкурса стали разработчики аппарата - команда под руководством М.П. Фархадова, идея конкурса принадлежит академику РАН Д.А. Новикову. А.В. Абдулов и А.Н. Абраменков представляли одну из команд. Всего в соревновании приняли участие 6 команд, каждая из которых представляла свой подход к синтезу регуляторов.
Основным итогом соревнований, помимо успешно выполненных роботом заданий, стало плодотворное общение команд, которое привело к взаимному обогащению научными идеями, а также доказательству содержательных теоретических результатов.
Подробно о самом аппарате, о том, какие задачи должен был выполнять подводный аппарат, о командах и их подходах к синтезу регуляторов и о результатах соревнований можно узнать в презентации к докладу.